2026 RoboRacer PNU-HYUNSONG CHAMPIONSHIP Rules (English)
The latest regulations for the 2026 RoboRacer PNU-HYUNSONG CHAMPIONSHIP.
📘 Table of Contents
- Overview
- General Competition Rules
- Vehicle Class
- Track and Racing Environment
- Inspection
- Mapping and Practice
- Mapping
- Practice
- Pit Stop
- General
- Entry
- Exit
- Qualification (Time Trial)
- General
- Objective
- Static Obstacles
- Invalid Records
- Notes
- Head-to-Head Race
- General
- Objective
- Random Static Obstacles
- Collisions
- Notes
- Common Notes (Important!!)
- Technical Summary Submission
- Purpose
- Technical Summary Slide Submission (Mandatory for All Teams)
- Technical Presentation by Excellent Evaluation Teams (Before Awards Ceremony, Mandatory Presentation)
- Warnings and Penalties
- Qualification
- One Rank Demotion
- Head-to-Head Race
- Additional 1 Lap
- Warning 1 Time
- Example Cases
- Qualification
1. Overview
The 2026 RoboRacer PNU-HYUNSONG CHAMPIONSHIP autonomous racing competition is open to teams of all levels. Participating teams may consist of up to 6 members per team, and each participant must be a member of only one team.
This competition will be held as an in-person competition from January 25 (Sun) to January 27 (Tue), 2026, at BEXCO Convention Hall, Busan.
Competition Schedule: January 25 (Sun) ~ 27 (Tue), 2026
Scale: 30 Teams (Domestic & International)
Teams can register for the competition through the official website.
Organized & Hosted by: RoboRacer Korea, Pusan National University RISE Business Group Future Mobility UIC, Pusan National University National University Development Project Future Mobility Specialization Project
Sponsored by: Hyunsong Education & Culture Foundation, Busan Shared University Future Mobility Major
To improve the quality of future ROBORACER competitions, it is recommended that winners of each race open-source their algorithm code under an open-source license in the ROBORACER Autonomous Racing Community repository on Github.
2. General Competition Rules
The competition consists of the following 4 stages (stages 1-4):
- Stage 1: Registration and inspection
- Stage 2: Mapping and practice sessions (mapping, official practice, free practice)
- Stage 3: Qualification (time trial)
- Stage 4: Head-to-head race
Teams registered for in-person competition must provide and build their vehicles directly according to the constraints listed below. Additionally, each team must have a unique vehicle (i.e., one research lab cannot participate with multiple teams using one vehicle).
2.1 Vehicle Class
Vehicle class allows only vehicles that meet the following constraints:
- Vehicles must be built according to ROBORACER guidelines, but alternative parts may be allowed if they comply with regulations. Any unclear or ambiguous matters must be confirmed with the race organizers in advance.
- Each vehicle is inspected as part of the qualification to ensure it meets the standards. Vehicles that do not meet the standards cannot participate.
- This competition is an algorithm competition. Configurations that gain unfair advantages through hardware are not allowed.
- Chassis: The race is designed for 1:10 Traxxas chassis (e.g., TRA74054, TRA6804R). These chassis are recommended, but chassis within 15% of Traxxas vehicle dimensions are generally allowed (width 238mm ~ 341mm, length 454mm ~ 654mm). Both 4WD and 2WD are allowed.
- Structural modifications to the vehicle's chassis (chassis/frame) and body (including body cover/body shell) are prohibited. "Modifications" include cutting, drilling (additional drilling), grinding, bending, molding, removal/replacement of structural components, and changes to wheelbase/track width. However, non-structural attachments for safety and sensor mounting (e.g., foam bumpers, detection boxes, sensor brackets) are allowed, but must be mounted in a way that does not remove material or change the shape of the chassis/body (using existing fastening points, clamps/brackets, double-sided tape, etc.).
- Tires: No restrictions (both sponge and rubber are allowed). However, use of chemical additives is strictly prohibited.
- Main Computing Unit: Limited to NVIDIA Jetson AGX Orin or below. However, only one computing unit can be used. External GPU (eGPU), desktop/server-grade GPU, and external AI accelerators (separate PCIe/Thunderbolt-based acceleration devices, etc.) are prohibited. The interpretation of "or below" follows the organizers' interpretation, and unclear or ambiguous equipment requires prior approval.
- LiDAR: No specification restrictions. Only one LiDAR sensor can be used. 3D LiDAR is also allowed. (Note that expensive 3D LiDAR may be damaged in high-speed racing)
- Camera: Both single cameras (Logitech C270, C920, Raspberry Pi Camera V2, Arducam, etc.) and stereo cameras (Intel Realsense, ZED, etc.) are allowed. However, cameras that provide additional information such as detection results or VIO results through internal processing are not allowed. (Providing only depth information is allowed)
- Motor: Only a single motor can be used in the powertrain. Internal modifications to the motor (winding changes, rotor/magnet replacement, etc.) and processing for performance modification purposes are prohibited.
- Battery: 4S LiPo battery or 3S or below. The total number of battery cells installed on the vehicle must be 4S or less. (e.g., 2S + 2S, 4S)
- Detection Box: Vehicles must be easily detectable by the opponent's LiDAR. Therefore, the vehicle must occupy a space of at least 12×12cm in all horizontal planes between 10~30cm from the ground.
- Foam Bumper: To minimize damage in collisions, bumpers must be made of soft material. When there are two or more vehicles on the track, detection box and foam bumper must be attached.
- Other Sensors: IMU, encoders, custom ESC, etc. are allowed. However, indoor GPS sensors (e.g., Marvelmind) are not allowed.
2.2 Track and Racing Environment
- The competition is held at BEXCO, Busan.
- Track size: approximately 25m × 12m
- Floor material: Carpet
2.3 Inspection
The purpose of inspection is to verify that the autonomous vehicle's hardware meets competition requirements and is not dangerous to the environment, opponents, or people.
- Vehicles must be built according to ROBORACER guidelines. Alternative parts are allowed if they comply with regulations.
- Teams must demonstrate emergency brake operation through remote human control. (However, it cannot be used for intervention during racing)
- Vehicle inspection is conducted on the first day of the competition by race judges.
- Inspection must be completed before the time trial, and re-inspection is required if there are significant changes to hardware or algorithms.
2.4 Mapping and Practice
2.4.1 Mapping
- Each team is given approximately 5 minutes of mapping time.
- During this time, the team has exclusive use of the entire track.
- Mapping, data acquisition, and practice can all be performed during this time.
- If you do not arrive at the designated time slot, the opportunity is lost and no additional time is provided.
- Each team can prepare multiple vehicles and use them on the track.
- Teams without map files can receive maps from nearby teams, but this is not supported by the organizers.
2.4.2 Practice
- Practice consists of official practice and free practice.
- Each team can prepare multiple vehicles, but only one vehicle per team can exist on the track.
- Sample obstacles are provided.
- The organizers are not responsible for accidents that occur during practice.
- Teams involved in accidents have an obligation to explain their algorithm when requested by judges.
2.5 Pit Stop
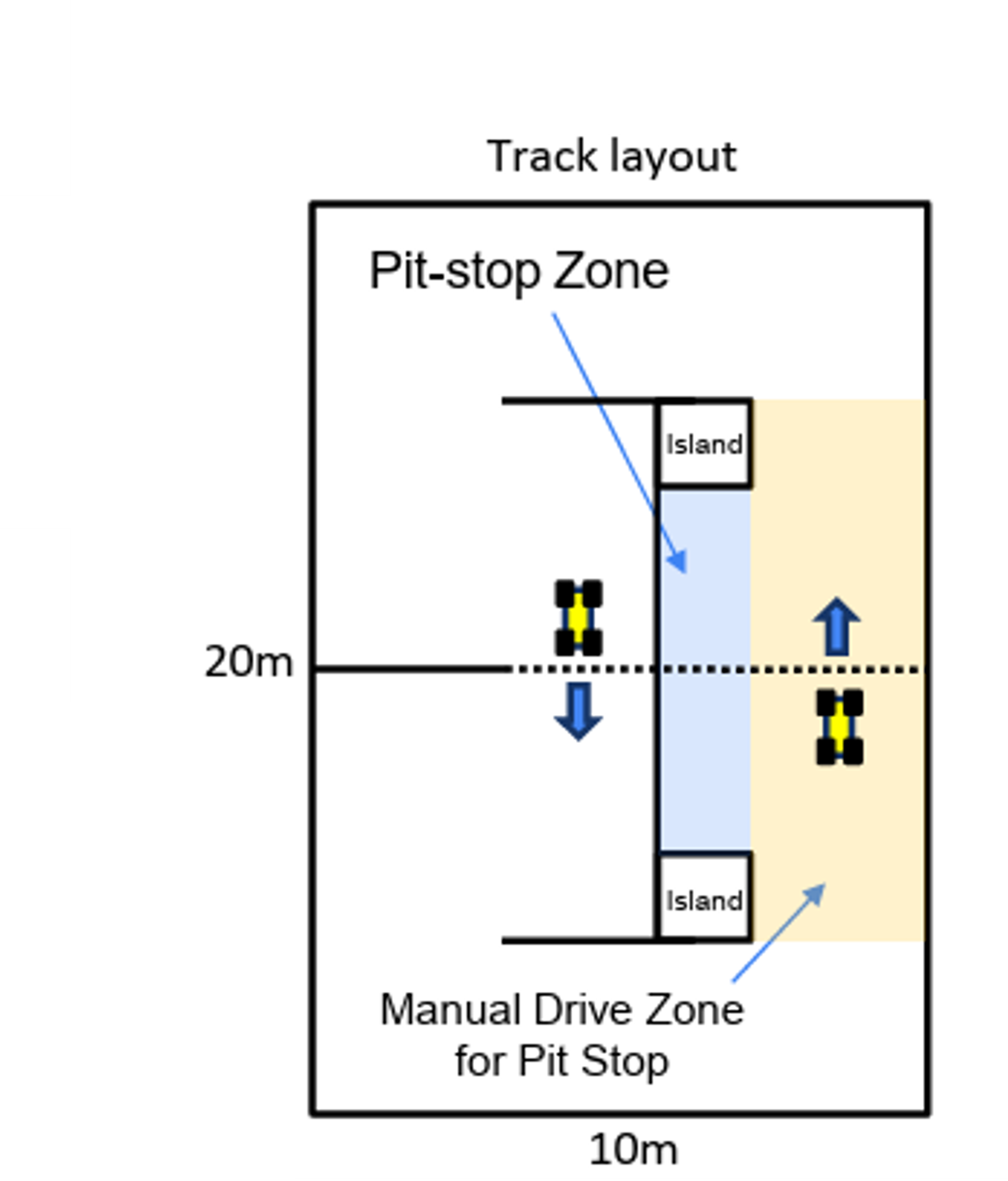
2.5.1 General
- The pit stop zone is a designated area for adjusting parameters without removing the vehicle from the track.
- It can be used in both qualification and head-to-head races.
- When the vehicle is in the pit stop zone, computers (mouse and keyboard) can be used for re-localization and parameter updates.
- As with the general track, people standing in this area is prohibited.
- After safely entering this zone, removing the vehicle to the island for repair is not a warning situation.
- Using this zone as a driving path in autonomous racing mode is prohibited.
2.5.2 Entry
- Manual driving (human driving) can only be used to enter the pit stop zone from the manual driving area.
- Manual driving to enter the pit during head-to-head races must not cause damage to the opponent's vehicle.
2.5.3 Exit
- When exiting from the pit stop zone to the general driving area, manual driving must not be used in any way.
- Vehicles exiting from the pit stop zone to the general driving area have an obligation to protect vehicles in the general driving area.
2.6 Qualification (Time Trial)
2.6.1 General
- Both practice and qualification use the same track.
- Qualification runs for 4 minutes within a given 6 minutes.
- Qualification can start at any time within 6 minutes, but 4 minutes is not always guaranteed.
- The format may change depending on the total number of participating teams.
2.6.2 Objective
- Fastest lap time
- Maximum number of laps completed without collision
Rankings are determined for each of the two records, and the final qualification result is determined by combining the two rankings.
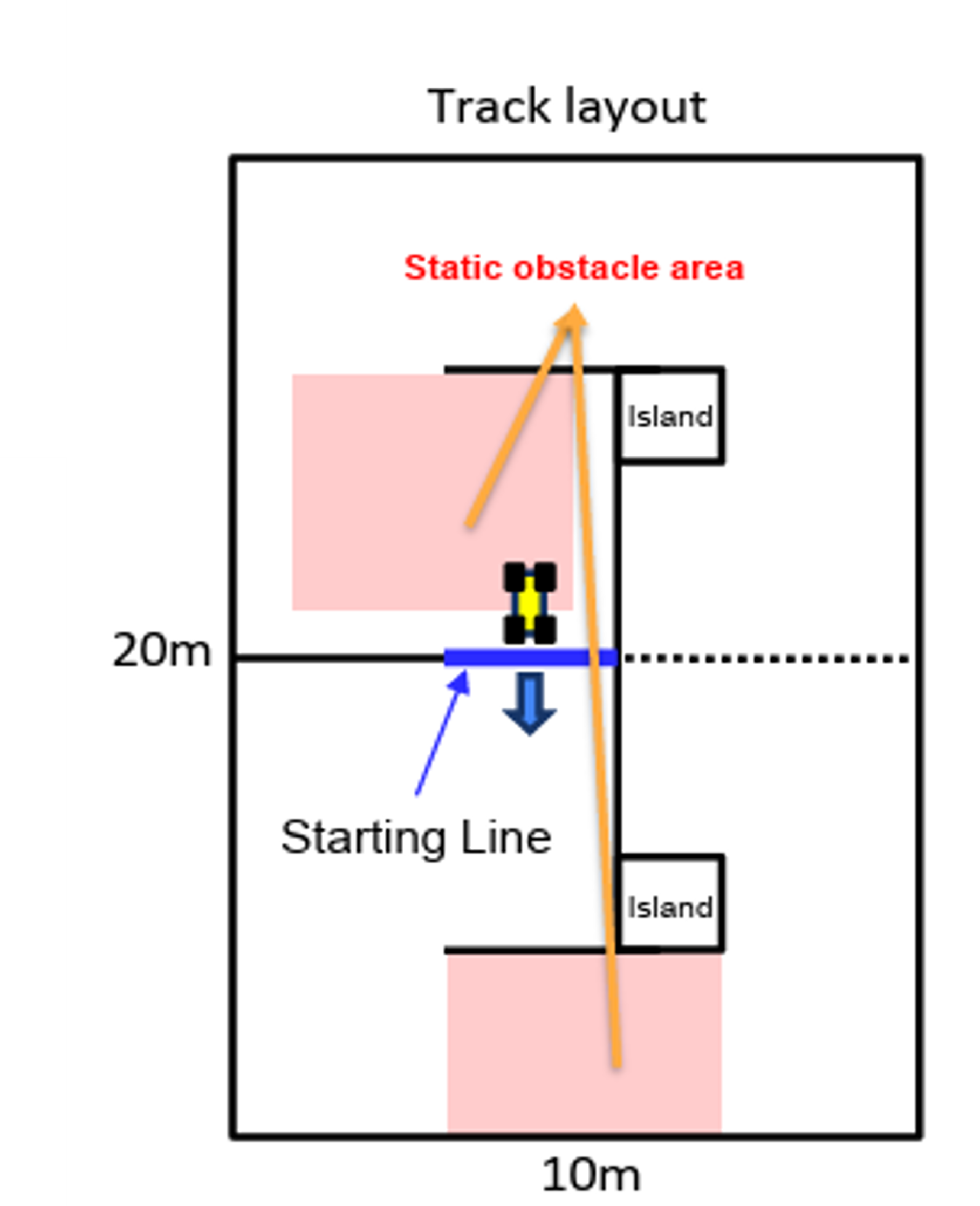
2.6.3 Static Obstacles
- One static obstacle is randomly placed in each obstacle area.
- Each obstacle is smaller than 0.5m × 0.5m.
- Obstacle positions are announced on the morning of qualification day and apply equally to all teams.
- Obstacles are removed in the middle of qualification time. (e.g., removed after 2 minutes in a 4-minute qualification)
- Obstacle removal is performed safely when it will not affect vehicles.
2.6.4 Invalid Records
- When a person intervenes and affects the vehicle: The lap time is invalid and the completed lap count is reset.
- When in contact with a static obstacle: The lap time is invalid and the completed lap count is reset.
- When in contact with the track but driving can continue without human intervention: Considered minor contact and the record is valid.
2.6.5 Notes
- Moving the vehicle to any arbitrary location (e.g., start line) during qualification is strictly prohibited.
- If a vehicle goes off the track and is put back in, the direction can be slightly adjusted but must be placed back at the location where it went out.
- If there was contact with the track, even if the record is not invalid, the track must be immediately restored to its original position.
- If there was contact with an obstacle, it must be immediately restored to its original position.
- All computation must be performed inside the vehicle, and data must not be transmitted to the vehicle during normal driving.
- Use of manual (human) emergency brake during normal driving is strictly prohibited.
- There are 2 islands in the track, and each island can have up to 2 people. Example configuration: (Judge1, Team member1 in Team1), (Judge2, Team member2 in Team1)
2.7 Head-to-Head Race
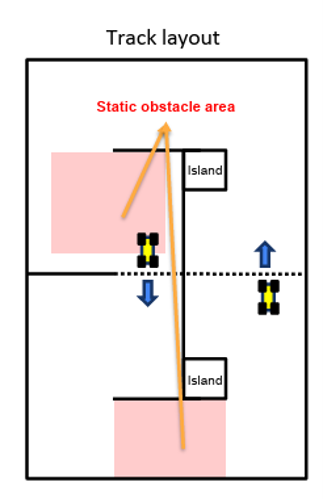
2.7.1 General
- Two vehicles start from different start lines positioned in opposite directions.
- A total of two static obstacles are used, and one is randomly placed in each area after all teams have completed race preparation.
- Static obstacles on the track are removed at some point after the race starts.
- Each vehicle must complete 20 laps first within the time limit while avoiding obstacles and opponents.
- Regardless of both teams' preparation status, the race starts within 10 minutes at the latest after the start preparation begins.
2.7.2 Objective
- Completing 20 laps first
2.7.3 Random Static Obstacles
- One static obstacle is randomly placed in each obstacle area.
- Each obstacle is smaller than 0.5m × 0.5m.
- Obstacle positions are determined after both vehicles have completed preparation at the start line.
- After obstacles are placed, only the start signal can be transmitted to vehicles.
- Obstacles are removed in the middle of the race.
- Static obstacles on the track are removed when the leading vehicle completes half of the required number of laps.
- The area marked with red squares indicates where static obstacles can be placed.
- Obstacle removal is performed safely when both vehicles are not affected.
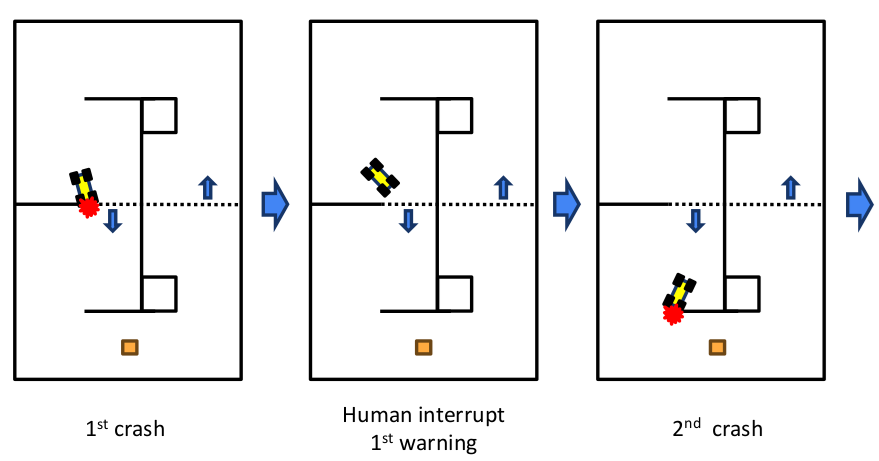
2.7.4 Collisions
Collisions with Track Boundaries and Static Obstacles
- Restore the track and obstacles to their original state.
- If the race can continue, the race must continue without interruption.
Vehicle-to-Vehicle Collisions
- Do not stop the race at team discretion without the judge's stop signal.
- In collision situations where the causing vehicle is clear but no overtaking occurred, the race continues as is.
- If the victim vehicle is clear and the victim vehicle is unable to drive, the collision is severe, or the victim was overtaken, the race is stopped.
2.7.5 Notes
- Do not stop the race at team discretion without the judge's stop signal.
- All computation must be performed inside the vehicle, and data must not be transmitted to the vehicle during normal driving.
- Use of manual (human) emergency brake during normal driving is strictly prohibited.
- Vehicles violating the detection box regulations cannot participate in the race.
- There are 2 islands in the track, and each island can have up to 2 people. (Judge1, Team member in Team1), (Judge2, Team member in Team2)
- In contact/accidents occurring during side-by-side driving where there is no clear causing party, the race is not stopped.
2.8 Common Notes (Important!!)
- If driving is difficult or dangerous due to collision, immediately emergency stop the vehicle.
- All computation must be performed inside the vehicle, and data must not be transmitted to the vehicle during normal driving.
- Manual (human) emergency brake during normal driving is strictly prohibited.
- Each team can prepare multiple vehicles, but cases where more than 2 vehicles from the same team can be on the track are only during mapping time.
- Sharing one vehicle among multiple teams is strictly prohibited.
- When 2 or more vehicles can exist on the track, detection box is mandatory. (e.g., not required during mapping/qualification)
- Complaints regarding Wi-Fi are not accepted. Autonomous systems must be designed to operate independently regardless of Wi-Fi environment. You can request teams not participating in the race to turn off their Wi-Fi, but this is for visualization/debugging convenience and does not guarantee algorithm performance.
- All hardware repairs and maintenance on the track (component repair, sensor recalibration, battery replacement, etc.) are prohibited. (Including pit stop area)
- Time slots for mapping, official practice, and qualification may vary depending on the number of participating teams.
- Time slots for mapping and official practice sessions are allocated on a first-come, first-served basis, and only teams that have completed registration and inspection can apply.
- People standing on the track is prohibited. (Except during mapping time)
- Use of joystick or pressing joystick buttons during racing is not allowed.
- The autonomous driving <-> human control switching module must be an on/off toggle method, not a "press and hold" method.
- Only one laptop can be connected for visualization (RViz, etc.) or debugging purposes.
- If too close to an obstacle ahead (opponent vehicle or static obstacle) making avoidance maneuvers impossible, you can request the judge to move back slightly.
2.9 Technical Summary Submission
2.9.1 Purpose
This regulation establishes the obligation for pre-submission of materials and presentation by excellent teams to systematically record and share participating teams' technical approaches, and to officially introduce excellent technical and operational cases before the awards ceremony, thereby enhancing the educational and research value of the competition.
2.9.2 Technical Summary Slide Submission (Mandatory for All Teams)
2.9.2.1 Submission Target
All participating teams must submit technical summary slides by the deadline specified by the competition.
2.9.2.2 Submission Format and Length
- Format: Slides (PDF or PPTX)
- Length: Within 10 pages
- Language: Korean or English (as per competition announcement)
2.9.2.3 Required Content
Slides must include at least the following items:
- Team/Vehicle Overview: Team name, vehicle version, sensor configuration
- Driving Algorithm Core Summary: Core ideas and driving strategy (1 page recommended)
- System Configuration: Overall architecture and main components (including core packages/nodes)
- Interface and Operation Logic: Main inputs/outputs (topics/periods, etc.) and Pit/Mission response (if applicable)
- Safety and Verification: Fail-safe/exception handling + verification methods and result summary
2.9.3 Technical Presentation by Excellent Evaluation Teams (Before Awards Ceremony, Mandatory Presentation)
2.9.3.1 Presentation Timing (Important)
- Technical presentations are not operated as qualification technical sessions.
- Technical presentations are conducted in official sessions from after provisional ranking calculation (or including result verification stage after competition ends) until before the awards ceremony begins.
- The exact schedule (session start/end time) will be announced by the organizers on the day.
2.9.3.2 Presentation Target (Excellent Evaluation Teams)
- The presentation target is "excellent evaluation teams" selected according to criteria determined by the organizers, regardless of final ranking.
- Number of excellent evaluation teams: Organizer announcement (recommended: 3~8 teams)
2.9.3.3 Excellent Evaluation Criteria (Examples, Finalized by Organizers)
The organizers may select excellent evaluation teams based on some or all of the following items:
- Performance: Lap time, stability, penalty minimization, completion rate
- Technical Quality: Clarity of Pit Zone response logic, structural design (modularization), real-time considerations
- Safety: Risk situation response, collision/departure minimization, fail-safe implementation
- Reproducibility/Explainability: Clarity of submitted slides, consistency of structure, ability to explain core packages/pipelines
- Innovation: New approaches (e.g., speed policy, state machine, local planning, sensor fusion, etc.)
※ "Excellent evaluation criteria and selection method" will be finalized through competition announcement.
2.9.3.4 Presentation Obligation and Format
- Excellent evaluation teams have a mandatory presentation obligation and must provide presentation materials and perform the presentation when requested.
- Presentation Materials: Based on the submitted slides within 10 pages, but partial modifications for pre-awards ceremony presentation are allowed (maintaining within 10 pages recommended)
- Presentation Time: Within 10 minutes per team (whether Q&A is included will be announced by organizers)
2.9.3.5 Measures for Non-compliance
If presentation is refused or performed insincerely without justifiable reason, the organizers may apply some of the following measures (finalized through competition announcement):
- Cancelation of excellent evaluation selection (exclusion from presentation target)
- Exclusion from special awards/category awards candidates
- Exclusion from official competition records/promotional materials
- Non-payment of prize money
- Other sanctions determined by organizers
3. Warnings and Penalties
Judgments on incidents are at the discretion of on-site judges, and all teams must respect this. Even if an incident includes multiple violations, only one penalty per incident is applied.
3.1 Qualification
3.1.1 One Rank Demotion
In the following cases, a one rank demotion penalty is applied to the qualification result.
-
Using keyboard or mouse during racing
(prohibited even if no data transmission occurs)
- Exception 1: When the vehicle is not on the track
- Exception 2: When in the pit stop area
- Exception 3: When transmitting initial guess for re-localization
-
Manual intervention (joystick, keyboard, other devices) on own vehicle
- Exception 1: When judge declares race stop and emergency stop is necessary
- Exception 2: When delivering start signal for start/restart
- Exception 3: When emergency stop is necessary due to driving impossibility from collision
- Exception 4: Driving in manual driving area for entering pit stop area
- Exception 5: When emergency stop is necessary after being stuck in obstacle for more than 5 seconds
- Exception 6: Emergency stop to prevent abnormal driving such as sudden acceleration or reverse driving
- Exception 7: When judge allows manual intervention because opponent vehicle severely damaged the track making driving impossible
- Exception 8: When stopping after qualification ends
- When a person directly creates or selects a modified path based on obstacle positions during racing
3.2 Head-to-Head Race
3.2.1 Additional 1 Lap
In the following cases, an additional 1 lap penalty is given.
- Accumulation of 3 warnings
- Fatal interference by a person with the opponent vehicle during racing
- When going to fix the track causes physical contact with the opponent vehicle affecting driving
- Accident with large impact in complete rear-end collision
- Accident with large impact even if not a complete rear-end collision
-
Using keyboard or mouse during racing
(prohibited even if no data transmission occurs)
- Exception 1: When the vehicle is not on the track
- Exception 2: When in the pit stop area
- Exception 3: When putting the vehicle back on the track after going off and transmitting initial guess for re-localization
-
Manual intervention on own vehicle
- Exception 1: When judge declares race stop and emergency stop is necessary
- Exception 2: After start, restart, or end
- Exception 3: When driving is impossible due to collision
- Exception 4: When in manual driving area for pit entry for pit stop
- Exception 5: When stopping to change to manual operation after being stuck in obstacle for more than 5 seconds
- Exception 6: Emergency stop to prevent abnormal driving such as sudden acceleration or reverse driving
- When a person directly creates or selects a modified path based on obstacle positions during racing
3.2.2 Warning 1 Time
In the following cases, warning 1 time is given.
- False start
- Not actively restoring the track
- When completely passing through the pit stop zone in autonomous racing mode
- When detection box fixation is not properly done during racing (Exception: If fixed in pit stop zone and driving resumed within 1 lap after warning. New warning may be given if not fixed every lap)
-
Intervention on own vehicle during racing
- Removing vehicle outside the track after collision
- Directly modifying vehicle heading
-
Interference by a person with opponent vehicle during racing
- When going to fix the track is detected by opponent vehicle's detection module affecting driving
- When there is a clear causing vehicle and victim vehicle, and the victim vehicle becomes unable to drive (e.g., small collision but victim vehicle spins and is overtaken)
3.2.3 Example Cases

Detailed example cases may be provided through on-site judge briefing or separate documents.
2.5 Power System
- Battery specifications are provided in the build manual
- Maximum voltage: 14.8V (4S LiPo)
- Batteries must be safely secured with appropriate protection devices
- Battery Management System (BMS) use is recommended
- Teams must bring sufficient batteries for the competition
2.6 Drive System
- Standard servo motor for steering (specifications provided)
- Brushless DC motor for propulsion (specifications provided)
- Electronic Speed Controller (ESC) must comply with specifications
3. Software Requirements
Software and Computing
- Open-source RoboRacer ROS2 stack is provided
- Teams can modify and extend the provided software stack
- All software must be autonomous and remote control is prohibited
- Emergency stop functionality must be implemented
- Code submission may be required upon request from organizers
4. Competition Format
Competition Track
4.1 Qualification Session
- All teams participate in time trial qualification
- Each team can attempt multiple times (number of attempts to be announced)
- Objective: Complete a lap without collision with track boundaries
- Qualification times are used to determine seeding for tournament stage
- Teams must complete at least 1 valid lap to pass qualification
4.2 Tournament Stage
- Teams that pass qualification participate in 1-on-1 racing
- Bracket format based on qualification seeding
- Each match consists of multiple laps
- Winner advances to next round
- Loser is eliminated.
5. Track Rules
Race Track
- Track layout is announced on the day of competition
- Track boundaries are clearly marked
- Vehicles must always remain within track boundaries
- Contact with track boundaries results in invalid lap
- Track may include obstacles and dynamic elements
- Track conditions may change during competition
6. Safety Rules
- All vehicles must pass technical inspection before competition
- Emergency stop functionality must be operational and accessible
- Teams must comply with all safety protocols during competition
- Safety equipment (gloves, safety goggles) must be worn in pit area
- Unsafe behavior results in immediate disqualification
- Organizers have the right to immediately stop vehicles deemed unsafe
7. Technical Inspection
- All vehicles must pass technical inspection on January 25, 2026
- Inspection items: dimensions, weight, safety features, sensor functionality
- Vehicle inspection must be completed within the designated time.
- Vehicles that fail technical inspection cannot participate in competition events.
8. Scoring System
8.1 Qualification Scoring
Scoring Area 1: Achieve fastest lap time without collision
- Invalid laps (boundary violations) are not counted
Scoring Area 2: Achieve maximum cumulative number of laps without collision
8.2 Tournament Scoring
- Winner of each match advances to next round
- Winner is determined by: team that completes first,
9. Disqualification
- Technical specification violations
- Safety rule violations
- Unsportsmanlike conduct
- Interference with other team vehicles
- Use of prohibited equipment or software
- Failure to comply with organizer instructions
- Disqualification decisions are final and cannot be appealed
10. Code of Conduct
- All participants must maintain professional and respectful behavior
- Teams must respect other teams and organizers
- All acts of cheating or unfair advantage are prohibited
- Teams must follow all instructions from competition officials
- Code of conduct violations may result in disqualification
11. Appeals and Disputes
- All competition decisions are made by the organizing committee
- Appeals must be submitted in writing within 30 minutes of the decision
- Appeals are reviewed by the technical committee
- Final decisions are binding
12. Additional Information
- Detailed competition manual is provided after registration
- Track specifications are provided before competition
- Rule changes are notified to all registered teams
- Organizers reserve the right to modify rules as necessary
- Please contact the organizing committee for inquiries
2026 RoboRacer PNU-HYUNSONG CHAMPIONSHIP 규정 (한국어)
2026 RoboRacer PNU-HYUNSONG CHAMPIONSHIP을 위한 최신 규정입니다.
📘 목차
- 개요
- 대회 일반
- 차량 클래스
- 트랙 및 경주 환경
- 검사
- 맵핑 및 연습
- 맵핑
- 연습
- 피트스톱
- 일반
- 진입
- 탈출
- 예선 (타임 트라이얼)
- 일반
- 목표
- 정적 장애물
- 기록 무효
- 주의 사항
- 일대일 경주
- 일반
- 목표
- 무작위 정적 장애물
- 충돌
- 주의 사항
- 공통 주의 사항 (중요!!)
- 기술 요약 자료 제출
- 목적
- 기술 요약 슬라이드 제출(모든 팀 의무)
- 우수 평가 팀 기술 발표(시상식 이전, 발표 의무)
- 경고 및 패널티
- 예선
- 순위 한단계 강등
- 일대일 경주
- 추가 1바퀴
- 경고 1회
- 예시 사례
- 예선
1. 개요
2026 RoboRacer PNU-HYUNSONG CHAMPIONSHIP 자율주행 레이싱 대회는 모든 수준의 팀에게 열려 있는 경주 대회입니다. 참가팀은 팀당 6인 이하로 구성할 수 있으며, 각 참가자는 오직 한 팀의 구성원이어야 합니다.
이 대회는 2026년 1월 25일(일)부터 1월 27일(화)까지 부산 벡스코 컨벤션홀 (BEXCO Convention Hall, Busan)에서 대면 경쟁으로 진행됩니다.
대회 일정: 2026년 1월 25일(일) ~ 27일(화)
규모: 국내외 30개 팀 (30 Teams, Domestic & International)
팀은 공식 웹사이트를 통해 대회에 등록할 수 있습니다.
주관 및 주최: RoboRacer Korea, 부산대학교 RISE사업단 미래모빌리티UIC, 부산대학교 국립대학육성사업 미래모빌리티 특성화사업
후원: Hyunsong Education & Culture Foundation (재)현송교육문화재단, Busan Shared University Future Mobility Major 부산공유대학 미래모빌리티전공
향후 ROBORACER 대회의 품질을 향상시키기 위해, 각 경주의 우승자는 자신의 알고리즘 코드를 Github의 ROBORACER Autonomous Racing Community repository에 오픈소스 라이선스로 공개하는 것이 권장됩니다.
2. 대회 일반
대회는 다음의 4단계(1~4단계)로 구성됩니다:
- 1단계: 등록 및 검사
- 2단계: 맵핑 및 연습 세션 (맵핑, 공식 연습, 자유 연습)
- 3단계: 예선 (타임 트라이얼)
- 4단계: 일대일 경주
대면 경쟁에 등록한 팀들은 아래에 나열된 제약 사항에 따라 직접 차량을 제공하고 제작해야 합니다. 또한, 각 팀은 고유한 차량을 가져야 합니다 (즉, 한 연구실이 하나의 차량으로 여러 팀을 참가시킬 수 없습니다).
2.1 차량 클래스
차량 클래스는 다음 제약 사항을 충족하는 차량만 허용합니다.
- 차량은 ROBORACER 지침에 따라 제작되어야 하지만, 규정을 준수하는 한 대체 부품이 허용될 수 있습니다. 불분명하거나 모호한 사항은 반드시 경주 주최자와 사전에 확인해야 합니다.
- 각 차량은 기준을 충족하는지 예선의 일부로 검사됩니다. 기준을 충족하지 않을 경우, 차량은 참가할 수 없습니다.
- 본 대회는 알고리즘 경쟁입니다. 하드웨어로 부당한 이득을 얻는 구성은 허용되지 않습니다.
- 섀시: 경기는 1:10 Traxxas 섀시(예: TRA74054, TRA6804R)로 설계되었습니다. 이러한 섀시가 권장되지만, 일반적으로 Traxxas 차량 치수의 15% 이내인 섀시는 허용됩니다 (폭 238mm ~ 341mm, 길이 454mm ~ 654mm). 4WD와 2WD 모두 허용됩니다.
- 차량의 섀시(샤시/프레임) 및 바디(차체 커버/바디쉘 포함)의 구조적 개조는 금지됩니다. "개조"에는 절단, 천공(추가 드릴링), 연마, 굽힘, 성형, 구조부품 제거/대체, 휠베이스·트랙폭 변경을 포함합니다. 단, 안전 및 센서 장착을 위한 비구조적 부착물(예: 폼 범퍼, 감지 박스, 센서 브라켓)은 허용하되, 섀시/바디 본체의 재료를 제거하거나 형상을 변경하지 않는 방식(기존 체결부 활용, 클램프/브라켓, 양면테이프 등)으로만 장착해야 합니다.
- 타이어: 제한 없음 (스폰지와 고무 모두 허용). 단, 화학 첨가제 사용은 엄격히 금지됩니다.
- 메인 컴퓨팅 유닛: NVIDIA Jetson AGX Orin 이하로 제한합니다. 단, 한 개의 컴퓨팅 유닛만 사용 가능합니다. 외장 GPU(eGPU), 데스크톱/서버급 GPU, 외부 AI 가속기(별도 PCIe/Thunderbolt 기반 가속장치 등) 사용은 금지됩니다. "이하"의 해석은 주최 측의 해석을 따르며 불분명하거나 모호한 장비는 사전 승인 대상입니다.
- 라이다: 사양 제한 없음. 한 개의 LiDAR 센서만 사용 가능합니다. 3D LiDAR 사용도 허용됩니다. (다만 고가의 3D LiDAR는 고속 경주에서 손상될 수 있음에 유의)
- 카메라: 단일 카메라(Logitech C270, C920, Raspberry Pi Camera V2, Arducam 등)와 스테레오 카메라(Intel Realsense, ZED 등) 모두 허용됩니다. 다만, 카메라 내부 처리에서 검출 결과나 VIO 결과 등 추가 정보를 제공하는 카메라는 허용되지 않습니다. (깊이 정보만 제공하는 것은 허용)
- 모터: 파워트레인에는 단일 모터만 사용할 수 있습니다. 모터의 내부 개조(권선 변경, 로터/자석 교체 등) 및 성능 개조 목적의 가공은 금지합니다.
- 배터리: 4S LiPo 배터리 또는 3S 이하. 차량에 장착된 배터리 셀 수의 총합이 4S 이하여야 합니다. (예: 2S + 2S, 4S)
- 감지 박스(Detection Box): 차량은 상대방의 LiDAR에 의해 쉽게 감지되어야 합니다. 따라서 차량은 지면에서 10~30cm 사이의 모든 수평면에서 최소 12×12cm 크기의 공간을 차지해야 합니다.
- 폼 범퍼: 충돌 시 손상을 최소화하기 위해 범퍼는 부드러운 재질이어야 합니다. 트랙에 두 대 이상의 차량이 있을 경우 감지 박스 및 폼 범퍼는 반드시 부착해야 합니다.
- 기타 센서: IMU, 엔코더, 커스텀 ESC 등은 허용됩니다. 단, 실내 GPS 센서(예: Marvelmind)는 허용되지 않습니다.
2.2 트랙 및 경주 환경
- 대회는 부산 벡스코에서 열립니다.
- 트랙 크기: 약 25m × 12m
- 바닥 재질: 카펫
2.3 검사
검사의 목적은 자율주행 차량의 하드웨어가 대회 요구사항을 충족하고, 환경·상대방·사람에게 위험하지 않은지 확인하는 것입니다.
- 차량은 ROBORACER 지침에 따라 제작되어야 합니다. 규정을 준수하는 한 대체 부품은 허용됩니다.
- 팀은 원격 인간 제어를 통한 비상 브레이크 작동을 시연해야 합니다. (단, 경주 중 개입용으로 사용할 수 없음)
- 차량 검사는 대회 첫째 날에 실시되며, 경주 심판에 의해 수행됩니다.
- 검사는 타임 트라이얼 전에 완료되어야 하며, 하드웨어나 알고리즘에 중대한 변경이 있을 경우 재검사가 필요합니다.
2.4 맵핑 및 연습
2.4.1 맵핑
- 각 팀에 약 5분의 맵핑 시간이 부여됩니다.
- 이 시간 동안 해당 팀은 트랙 전체를 독점적으로 사용할 수 있습니다.
- 맵핑뿐 아니라 데이터 취득 및 연습도 이 시간에 수행할 수 있습니다.
- 지정된 타임슬롯에 오지 못하면 기회는 소멸하며, 추가 시간은 제공되지 않습니다.
- 각 팀은 여러 대의 차량을 준비하고 트랙 위에서 사용할 수 있습니다.
- 맵 파일이 없는 팀은 주변 팀에게 맵을 받을 수 있지만, 이는 운영진이 지원하지 않습니다.
2.4.2 연습
- 연습은 공식 연습과 자유 연습으로 구성됩니다.
- 각 팀은 여러 대의 차량을 준비할 수 있지만, 트랙 위에는 팀당 1대만 존재해야 합니다.
- 샘플 장애물이 제공됩니다.
- 연습 중 발생한 사고에 대해 주최 측은 책임을 지지 않습니다.
- 사고가 발생한 팀은 심판 요청 시 알고리즘 설명 의무가 있습니다.
2.5 피트스톱
2.5.1 일반
- 피트스톱 존은 차량을 트랙에서 제거하지 않고 매개변수를 조정하기 위한 지정 구역입니다.
- 예선 및 일대일 경주에서 모두 사용할 수 있습니다.
- 차량이 피트스톱 존에 있을 때, 재위치 설정 및 매개변수 업데이트를 위해 컴퓨터(마우스 및 키보드)를 사용할 수 있습니다.
- 이 구역에서도 일반 트랙과 마찬가지로 사람이 서 있는 것은 금지됩니다.
- 이 구역으로 안전하게 진입한 뒤 수리를 위해 차량을 섬으로 빼는 것은 경고에 해당하지 않는 상황입니다.
- 자율 레이싱 모드에서 이 구역을 주행 경로처럼 사용하는 것은 금지됩니다.
2.5.2 진입
- 사람이 하는 주행(수동 주행)은 수동 주행 구역에서 피트스톱 존에 진입하기 위한 경우에만 사용할 수 있습니다.
- 일대일 경주 중 피트에 진입하기 위한 수동 주행은 상대방 차량에 피해를 주어서는 안 됩니다.
2.5.3 탈출
- 피트스톱 존에서 일반 주행 구역으로 탈출할 때 어떠한 방식으로든 수동 주행을 해서는 안 됩니다.
- 피트스톱 존에서 일반 주행 영역으로 탈출하는 차량은, 일반 주행 영역에 있는 차량을 보호해야 할 의무가 있습니다.
2.6 예선 (타임 트라이얼)
2.6.1 일반
- 연습과 예선 모두 동일한 트랙을 사용합니다.
- 예선은 주어진 6분 중 4분간 진행됩니다.
- 예선은 6분 내에서 언제든지 시작할 수 있으나, 4분이 항상 보장되지는 않습니다.
- 진행 방식은 총 참가 팀 수에 따라 변경될 수 있습니다.
2.6.2 목표
- 가장 빠른 랩 타임
- 충돌 없이 완주한 최다 랩 수
두 가지 기록에 대해 각각 순위를 매긴 후, 두 순위를 종합하여 최종 예선 결과가 정해집니다.
2.6.3 정적 장애물
- 각 장애물 영역에 무작위로 하나의 정적 장애물이 배치됩니다.
- 각 장애물의 크기는 0.5m × 0.5m보다 작습니다.
- 장애물의 위치는 예선 당일 아침에 공개되며 모든 팀에게 동일하게 적용됩니다.
- 장애물은 예선 시간 중간에 제거됩니다. (예: 4분 예선이라면 2분 경과 후 제거)
- 장애물 제거는 차량에 영향이 가지 않을 때 안전하게 수행됩니다.
2.6.4 기록 무효
- 사람이 개입하여 차량에 영향을 준 경우: 해당 랩 타임 무효 및 완주 랩 수가 초기화됩니다.
- 정적 장애물에 접촉한 경우: 해당 랩 타임 무효 및 완주 랩 수가 초기화됩니다.
- 트랙에 접촉했지만 사람 개입 없이 주행이 계속 가능한 경우: 사소한 접촉으로 간주하며 기록은 유효합니다.
2.6.5 주의 사항
- 예선 도중 차량을 임의의 위치(예: 시작선)로 가져가는 것은 엄격히 금지됩니다.
- 차량이 트랙 밖으로 나갔다가 다시 넣는 경우, 방향은 약간 조정할 수 있지만 나갔던 위치로 다시 배치해야 합니다.
- 트랙에 접촉이 있었다면 기록이 무효가 아니더라도 즉시 트랙을 원래 위치로 복구해야 합니다.
- 장애물에 접촉했다면 즉시 원래 위치로 복구해야 합니다.
- 모든 연산은 차량 내부에서 수행되어야 하며, 정상 주행 중 차량에 데이터를 전송해서는 안 됩니다.
- 정상 주행 중 수동(인간) 비상 브레이크 사용은 엄격히 금지됩니다.
- 트랙 내에는 2개의 섬이 존재하며, 각 섬에는 2명까지 있을 수 있습니다. 구성 예: (심판1, 팀원1 in 팀1), (심판2, 팀원2 in 팀1)
2.7 일대일 경주
2.7.1 일반
- 두 차량은 반대 방향에 위치한 서로 다른 출발선에서 시작합니다.
- 총 두 개의 정적 장애물이 사용되며, 모든 팀이 경주 준비를 완료한 후 각 구역에 무작위로 한 개씩 배치됩니다.
- 트랙의 정적 장애물은 경주 시작 후 언젠가 제거됩니다.
- 각 차량은 시간 제한 내에 장애물과 상대방을 피하면서 20랩을 먼저 완주해야 합니다.
- 양 팀의 준비 상태와 관계없이 출발 준비 시작 후 늦어도 10분 이내에 경주가 시작됩니다.
2.7.2 목표
- 먼저 20바퀴를 완주하는 것
2.7.3 무작위 정적 장애물
- 각 장애물 영역에 무작위로 하나의 정적 장애물이 배치됩니다.
- 각 장애물은 0.5m × 0.5m보다 작습니다.
- 장애물의 위치는 두 차량이 출발선에서 준비를 마친 후 결정됩니다.
- 장애물이 배치된 이후에는 출발 신호만 차량에 전달될 수 있습니다.
- 장애물은 레이스 중간에 제거됩니다.
- 트랙의 정적 장애물은 선행 차량이 완주 기준 랩 수의 절반을 완주하였을 때 제거됩니다.
- 빨간 사각형으로 표시된 구역이 정적 장애물이 배치될 수 있는 영역을 의미합니다.
- 장애물 제거는 두 차량 모두 영향을 받지 않을 때 안전하게 수행됩니다.
2.7.4 충돌
트랙 경계 및 정적 장애물과의 충돌
- 트랙과 장애물을 원래 상태로 복구합니다.
- 경주가 계속 가능하다면 중단 없이 경주를 지속해야 합니다.
차량 대 차량 충돌
- 심판의 정지 신호 없이 팀 재량으로 경주를 중단해서는 안 됩니다.
- 충돌 상황에서 가해 차량이 명확하지만 추월이 일어나지 않은 경우, 경주는 그대로 진행됩니다.
- 피해 차량이 명확하고 피해 차량이 주행 불가능하거나 충돌이 심각하거나 추월당한 경우, 경기는 중단됩니다.
2.7.5 주의 사항
- 심판의 정지 신호 없이 팀 재량으로 경주를 중단하지 마십시오.
- 모든 연산은 차량 내부에서 수행되어야 하며, 정상 주행 중 차량에 데이터를 전송해서는 안 됩니다.
- 정상 주행 중 수동(인간) 비상 브레이크 사용은 엄격히 금지됩니다.
- 감지 박스 규정을 위반한 차량은 레이스에 참가할 수 없습니다.
- 트랙 내에는 2개의 섬이 존재하고, 각 섬에는 2명까지 있을 수 있습니다. (심판1, 팀원 in 팀1), (심판2, 팀원 in 팀2)
- 나란히 주행 중 발생하는 접촉/사고에서 명확한 가해자가 없는 경우, 레이스를 중지시키지 않습니다.
2.8 공통 주의 사항 (중요!!)
- 충돌로 인해 주행이 어렵거나 위험한 경우 즉시 차량을 비상 정지시켜야 합니다.
- 모든 연산은 차량 내부에서 수행되어야 하며, 정상 주행 중 차량에 데이터를 전송해서는 안 됩니다.
- 정상 주행 중 수동(인간) 비상 브레이크는 엄격히 금지됩니다.
- 각 팀은 여러 대의 차량을 준비할 수 있지만, 같은 팀 소속 차량이 트랙 위에 2대 이상 나올 수 있는 경우는 맵핑 시간뿐입니다.
- 한 차량을 여러 팀이 공유하는 것은 엄격히 금지됩니다.
- 트랙 내에 2대 이상의 차량이 존재할 수 있는 경우, detection 박스는 필수입니다. (예: 맵핑/예선에서는 부착하지 않아도 됨)
- Wi-Fi에 관한 이의제기는 받지 않습니다. 자율주행 시스템은 Wi-Fi 환경과 무관하게 독립적으로 동작하도록 설계해야 합니다. 경주에 참가하지 않는 팀의 Wi-Fi를 꺼달라고 요청할 수는 있으나, 이는 시각화/디버깅 편의를 위한 것이며 알고리즘 성능 보장은 아닙니다.
- 트랙 내에서의 모든 하드웨어 수리 및 정비(부품 수리, 센서 재보정, 배터리 교체 등)는 금지됩니다. (피트스톱 구역 포함)
- 맵핑, 공식 연습 및 예선 전용 시간은 참가 팀 수에 따라 달라질 수 있습니다.
- 맵핑 및 공식 연습 세션의 타임슬롯은 선착순으로 배정되며, 등록·검사를 완료한 팀만 신청할 수 있습니다.
- 사람이 트랙 위에 있는 것은 금지됩니다. (맵핑 시간 제외)
- 경주 중 조이스틱 사용이나 조이스틱 버튼 누르기는 허용되지 않습니다.
- 자율주행 <-> 인간 제어 전환 모듈은 "누르고 유지" 방식이 아닌 on/off 토글 방식이어야 합니다.
- 시각화(RViz 등) 또는 디버깅 용도의 랩톱은 한 대만 연결할 수 있습니다.
- 앞의 장애물(상대 차량 또는 정적 장애물)에 너무 가까이 붙어 회피 기동이 불가능한 경우, 심판에게 요청하여 뒤로 약간 이동할 수 있습니다.
2.9 기술 요약 자료 제출
2.9.1 목적
본 규정은 참가팀의 기술 접근을 체계적으로 기록·공유하고, 시상식 이전에 우수한 기술 및 운영 사례를 공식적으로 소개함으로써 대회의 교육·연구적 가치를 강화하기 위해 사전 자료 제출 및 우수팀 발표 의무를 규정한다.
2.9.2 기술 요약 슬라이드 제출(모든 팀 의무)
2.9.2.1 제출 대상
모든 참가팀은 대회에서 지정한 마감 시각까지 기술 요약 슬라이드를 제출해야 한다.
2.9.2.2 제출 형식 및 분량
- 형식: 슬라이드(PDF 또는 PPTX)
- 분량: 10페이지 이내
- 언어: 한국어 또는 영어(대회 공지에 따름)
2.9.2.3 필수 포함 항목
슬라이드는 아래 항목을 최소 포함해야 한다.
- 팀/차량 개요: 팀명, 차량 버전, 센서 구성
- 주행 알고리즘 핵심 요약: 핵심 아이디어 및 주행 전략(1장 권장)
- 시스템 구성: 전체 아키텍처 및 주요 구성요소(핵심 패키지/노드 포함)
- 인터페이스 및 동작 로직: 주요 입력·출력(토픽/주기 등) 및 Pit/미션 대응(해당 시)
- 안전 및 검증: Fail-safe/예외 처리 + 검증 방법 및 결과 요약
2.9.3 우수 평가 팀 기술 발표(시상식 이전, 발표 의무)
2.9.3.1 발표 시점(중요)
- 기술 발표는 예선 기술 세션으로 운영하지 않는다.
- 기술 발표는 순위가 잠정 산출된 이후(또는 경기 종료 후 결과 검증 단계 포함)부터 시상식 시작 이전까지의 공식 세션에서 진행한다.
- 정확한 일정(세션 시작/종료 시각)은 주최 측이 당일 공지한다.
2.9.3.2 발표 대상(우수 평가 팀)
- 발표 대상은 최종 순위와 무관하게, 주최 측이 정한 기준에 따라 선정된 "우수 평가 팀"으로 한다.
- 우수 평가 팀 수: 주최 측 공지(권장: 3~8팀 범위)
2.9.3.3 우수 평가 기준(예시, 주최 측 확정)
주최 측은 아래 항목 중 일부 또는 전부를 기준으로 우수 평가 팀을 선정할 수 있다.
- 성능: 랩타임, 안정성, 페널티 최소화, 완주율
- 기술성: Pit Zone 대응 로직의 명확성, 구조적 설계(모듈화), 실시간성 고려
- 안전성: 위험 상황 대응, 충돌/이탈 최소화, 페일세이프 구현
- 재현성/설명력: 제출 슬라이드의 명료성, 구성의 일관성, 핵심 패키지/파이프라인 설명 가능성
- 혁신성: 새로운 접근(예: 속도 정책, 상태기계, 로컬 플래닝, 센서 융합 등)
※ "우수 평가 기준 및 선정 방식"은 대회 공지로 최종 확정한다.
2.9.3.4 발표 의무 및 형식
- 우수 평가 팀은 발표가 의무이며, 요청 시 반드시 발표 자료를 제공하고 발표를 수행해야 한다.
- 발표 자료: 제출한 10페이지 이내 슬라이드를 기반으로 하되, 시상식 전 발표용으로 일부 수정 가능(10페이지 이내 유지 권장)
- 발표 시간: 팀당 10분 이내 발표(질의응답 포함 여부는 주최 측 공지)
2.9.3.5 불이행 시 조치
정당한 사유 없이 발표를 거부하거나 불성실하게 이행할 경우, 주최 측은 다음 조치 중 일부를 적용할 수 있다(대회 공지로 확정).
- 우수 평가 선정 취소(발표 대상 제외)
- 특별상/부문상 등 후보 제외
- 대회 공식 기록/홍보 자료에서 제외
- 상금 미지급
- 기타 주최 측이 정한 제재
3. 경고 및 패널티
사건에 대한 판정은 현장 심판의 재량에 따르며, 모든 팀은 이를 존중해야 합니다. 여러 위반이 포함된 사건이라도 사건당 하나의 페널티만 적용됩니다.
3.1 예선
3.1.1 순위 한단계 강등
다음의 경우 예선 결과에서 순위 한 단계 강등 페널티가 적용됩니다.
-
경주 중 키보드, 마우스를 사용한 경우
(데이터 전송이 일어나지 않더라도 사용 금지)
- 예외1: 차량이 트랙 위에 없는 경우
- 예외2: 피트스톱 구간 위에 있는 경우
- 예외3: re-localization을 위한 initial guess를 전송하는 경우
-
매뉴얼 조작(joystick, keyboard, 기타 장치)으로 본인 차량에 간섭한 경우
- 예외1: 심판이 레이스 중지를 선언하여 비상 정지가 필요한 경우
- 예외2: 출발/재출발 시 출발 신호 전달을 위한 경우
- 예외3: 충돌로 인한 주행 불가 상태에서 비상 정지가 필요한 경우
- 예외4: 피트스톱 구간으로 진입하기 위한 수동 주행 구역에서의 주행
- 예외5: 장애물에 5초 이상 갇혀 비상 정지가 필요한 경우
- 예외6: 급발진, 역주행 등의 이상 주행을 막기 위한 비상 정지
- 예외7: 상대 차량이 트랙을 심각하게 손상하여 주행이 불가능하고, 심판이 매뉴얼 조작을 허용한 경우
- 예외8: 예선 종료 이후 정지하는 경우
- 레이스 도중 장애물 위치에 따라 수정된 경로를 사람이 직접 생성하거나 선택하는 경우
3.2 일대일 경주
3.2.1 추가 1바퀴
다음의 경우 추가 1바퀴 페널티가 부여됩니다.
- 경고 3회 누적
- 경주 중 상대 차량에 대한 사람의 치명적인 방해
- 트랙을 고치러 가다가 상대 차량에 물리적 접촉을 하여 주행에 영향을 준 경우
- 완전한 후방 충돌에서 큰 충격을 동반한 사고
- 완전한 후방 충돌이 아니더라도 큰 충격을 동반한 사고
-
경주 중 키보드, 마우스를 사용한 경우
(데이터 전송이 일어나지 않더라도 사용 금지)
- 예외1: 차량이 트랙 위에 없는 경우
- 예외2: 피트스톱 구간 위에 있는 경우
- 예외3: 트랙에서 나갔다가 다시 트랙에 넣고, re-localization을 위한 initial guess를 전송하는 경우
-
매뉴얼 조작으로 본인 차량에 간섭한 경우
- 예외1: 심판이 레이스 중지를 선언하여 비상 정지가 필요한 경우
- 예외2: 출발, 재출발, 종료 이후
- 예외3: 충돌로 인한 주행 불가 상태인 경우
- 예외4: 피트스톱용 수동 주행 구역에서 피트 진입을 위한 경우
- 예외5: 장애물에 5초 이상 갇혀 매뉴얼 조작으로 변경하기 위한 정지를 하는 경우
- 예외6: 급발진, 역주행 등 이상 주행을 막기 위한 비상 정지
- 레이스 도중 장애물의 위치에 따라 수정된 경로를 사람이 직접 생성하거나 고르는 경우
3.2.2 경고 1회
다음의 경우 경고 1회가 부여됩니다.
- 부정 출발
- 트랙 복구를 적극적으로 하지 않은 경우
- 자율 레이싱 모드에서 피트스톱 존을 완전히 넘어간 경우
- 레이스 도중 감지 박스 고정이 제대로 되지 않는 경우 (예외: 경고 이후 1바퀴 이내에 피트스톱 존에서 수정하고 주행을 재개한 경우. 매 바퀴마다 수정하지 않을 시 새로운 경고 부여 가능)
-
경주 중 자신의 차량에 대한 개입
- 충돌 이후 차량을 트랙 바깥으로 빼는 행위
- 차량의 헤딩을 직접 수정하는 행위
-
경주 중 상대 차량에 대한 사람의 방해
- 트랙을 고치러 가다가 상대 차량의 detection 모듈에 감지되어 주행에 영향을 주는 경우
- 명확한 가해 차량과 피해 차량이 존재하고, 피해 차량이 주행 불능 상태가 된 경우 (예: 충돌 정도는 작지만 피해 차량이 스핀하여 추월당한 경우)
3.2.3 예시 사례
세부 예시 사례는 현장 심판 브리핑 또는 별도 문서를 통해 제공될 수 있습니다.
2.5 전원 시스템
- 배터리 규격은 빌드 매뉴얼에 제공됩니다
- 최대 전압: 14.8V (4S LiPo)
- 배터리는 적절한 보호 장치와 함께 안전하게 고정되어야 합니다
- 배터리 관리 시스템(BMS) 사용 권장
- 팀은 대회에 충분한 배터리를 지참해야 합니다
2.6 구동 장치
- 조향용 표준 서보 모터 (규격 제공)
- 추진용 브러시리스 DC 모터 (규격 제공)
- 전자 속도 제어기(ESC)는 규격을 준수해야 합니다
3. 소프트웨어 요구사항
소프트웨어 및 컴퓨팅
- 오픈소스 RoboRacer ROS2 스택이 제공됩니다
- 팀은 제공된 소프트웨어 스택을 수정하고 확장할 수 있습니다
- 모든 소프트웨어는 자율주행이어야 하며 원격 제어는 금지됩니다
- 비상 정지 기능이 구현되어야 합니다
- 주최 측 요청 시 코드 제출이 필요할 수 있습니다
4. 대회 형식
대회 트랙
4.1 예선 세션
- 모든 팀이 타임 트라이얼 예선에 참가합니다
- 각 팀은 여러 번 시도할 수 있습니다 (횟수는 추후 공지)
- 목표: 트랙 경계와 충돌 없이 랩 완주
- 예선 시간은 토너먼트 단계 시드 결정에 사용됩니다
- 팀은 최소 1회의 유효한 랩을 완주해야 예선 통과
4.2 토너먼트 단계
- 예선 통과 팀들이 1대1 레이싱에 참가합니다
- 예선 시드를 기반으로 한 브래킷 형식
- 각 경기는 여러 랩으로 구성됩니다
- 승자가 다음 라운드로 진출합니다
- 패자는 탈락합니다.
5. 트랙 규칙
레이스 트랙
- 트랙 레이아웃은 대회 당일 공개됩니다
- 트랙 경계는 명확하게 표시됩니다
- 차량은 항상 트랙 경계 내에 있어야 합니다
- 트랙 경계와의 접촉은 랩 무효 처리됩니다
- 트랙에는 장애물 및 동적 요소가 포함될 수 있습니다
- 트랙 조건은 대회 중 변경될 수 있습니다
6. 안전 규칙
- 모든 차량은 경기 전 기술 검사를 통과해야 합니다
- 비상 정지 기능이 작동하고 접근 가능해야 합니다
- 팀은 대회 중 모든 안전 프로토콜을 준수해야 합니다
- 피트 영역에서는 안전 장비(장갑, 안전 고글)를 착용해야 합니다
- 안전하지 않은 행동은 즉시 실격 처리됩니다
- 주최 측은 안전하지 않다고 판단되는 차량을 즉시 중지할 권리가 있습니다
7. 기술 검사
- 모든 차량은 2026년 1월 25일 기술 검사를 통과해야 합니다
- 검사 항목: 치수, 무게, 안전 기능, 센서 기능
- 차량 검사는 지정된 시간 내에 검차를 완료하여야 합니다.
- 기술검사를 통과하지 못한 차량은 대회 이벤트에 참여할 수 없습니다.
8. 채점 시스템
8.1 예선 채점
채점영역1: 충돌하지 않고 가장 빠른 랩타임 달성
- 무효 랩(경계 위반)은 집계되지 않습니다
채점영역2: 충돌하지 않은 최대한 많은 누적 랩 수 달성
8.2 토너먼트 채점
- 각 경기의 승자가 다음 라운드로 진출합니다
- 승자는 다음 기준으로 결정: 먼저 완주한 팀,
9. 실격
- 기술 규격 위반
- 안전 규칙 위반
- 스포츠맨십에 어긋나는 행위
- 다른 팀 차량에 대한 방해
- 금지된 장비 또는 소프트웨어 사용
- 주최 측 지시 불이행
- 실격 결정은 최종이며 이의 제기할 수 없습니다
10. 행동 강령
- 모든 참가자는 전문적이고 존중하는 행동을 유지해야 합니다
- 팀은 다른 팀과 주최 측을 존중해야 합니다
- 부정행위나 불공정한 이점을 취하는 모든 행위는 금지됩니다
- 팀은 대회 관계자의 모든 지시를 따라야 합니다
- 행동 강령 위반 시 실격될 수 있습니다
11. 이의 제기 및 분쟁
- 모든 대회 결정은 조직위원회가 내립니다
- 이의 제기는 결정 후 30분 이내에 서면으로 제출해야 합니다
- 이의 제기는 기술위원회에서 검토됩니다
- 최종 결정은 구속력이 있습니다
12. 추가 정보
- 상세한 대회 매뉴얼은 등록 후 제공됩니다
- 트랙 규격은 대회 전에 제공됩니다
- 규칙 변경 사항은 모든 등록 팀에 통보됩니다
- 주최 측은 필요 시 규칙을 수정할 권리가 있습니다
- 문의사항은 조직위원회에 연락하시기 바랍니다
2.5 전원 시스템
- 배터리 규격은 빌드 매뉴얼에 제공됩니다
- 최대 전압: 14.8V (4S LiPo)
- 배터리는 적절한 보호 장치와 함께 안전하게 고정되어야 합니다
- 배터리 관리 시스템(BMS) 사용 권장
- 팀은 대회에 충분한 배터리를 지참해야 합니다
2.6 구동 장치
- 조향용 표준 서보 모터 (규격 제공)
- 추진용 브러시리스 DC 모터 (규격 제공)
- 전자 속도 제어기(ESC)는 규격을 준수해야 합니다
3. 소프트웨어 요구사항

- 팀은 ROS2(로봇 운영 체제 2) 프레임워크를 사용해야 합니다
- 오픈소스 RoboRacer ROS2 스택이 제공됩니다
- 팀은 제공된 소프트웨어 스택을 수정하고 확장할 수 있습니다
- 모든 소프트웨어는 자율주행이어야 하며 원격 제어는 금지됩니다
- 비상 정지 기능이 구현되어야 합니다
- 주최 측 요청 시 코드 제출이 필요할 수 있습니다
4. 대회 형식

4.1 예선 세션
- 모든 팀이 타임 트라이얼 예선에 참가합니다
- 각 팀은 여러 번 시도할 수 있습니다 (횟수는 추후 공지)
- 목표: 트랙 경계와 충돌 없이 랩 완주
- 예선 시간은 토너먼트 단계 시드 결정에 사용됩니다
- 팀은 최소 1회의 유효한 랩을 완주해야 예선 통과
4.2 토너먼트 단계
- 예선 통과 팀들이 1대1 레이싱에 참가합니다
- 예선 시드를 기반으로 한 브래킷 형식
- 각 경기는 여러 랩으로 구성됩니다
- 승자가 다음 라운드로 진출합니다
- 패자는 탈락합니다
4.3 그랑프리 결승
- 토너먼트 단계 상위 팀들이 결승 레이스에 참가합니다
- 동일 트랙에서 여러 랩 진행
- 최종 순위는 레이스 결과에 따라 결정됩니다
5. 트랙 규칙

- 트랙 레이아웃은 대회 당일 공개됩니다
- 트랙 경계는 명확하게 표시됩니다
- 차량은 항상 트랙 경계 내에 있어야 합니다
- 트랙 경계와의 접촉은 랩 무효 처리됩니다
- 트랙에는 장애물 및 동적 요소가 포함될 수 있습니다
- 트랙 조건은 대회 중 변경될 수 있습니다
6. 안전 규칙
- 최대 속도 제한: 8 m/s (대회 당일 확인)
- 모든 차량은 경기 전 기술 검사를 통과해야 합니다
- 비상 정지 기능이 작동하고 접근 가능해야 합니다
- 팀은 대회 중 모든 안전 프로토콜을 준수해야 합니다
- 피트 영역에서는 안전 장비(장갑, 안전 고글)를 착용해야 합니다
- 안전하지 않은 행동은 즉시 실격 처리됩니다
- 주최 측은 안전하지 않다고 판단되는 차량을 즉시 중지할 권리가 있습니다
7. 기술 검사
- 모든 차량은 2026년 1월 25일 기술 검사를 통과해야 합니다
- 검사 항목: 치수, 무게, 안전 기능, 센서 기능
- 검사 실패 차량은 문제 해결을 위한 1회 기회가 제공됩니다
- 차량은 대회 이벤트 참가 전에 검사를 통과해야 합니다
8. 채점 시스템
8.1 예선 채점
- 주요 목표: 충돌하지 않고 최소 랩타임 달성
- 가장 빠른 유효 랩타임이 예선 순위를 결정합니다
- 무효 랩(경계 위반)은 집계되지 않습니다
8.2 토너먼트 채점
- 각 경기의 승자가 다음 라운드로 진출합니다
- 승자는 다음 기준으로 결정: 먼저 완주한 팀, 또는 양쪽 모두 완주 시 더 빠른 시간
8.3 결승 채점
- 최종 순위는 레이스 순위에 따라 결정됩니다
- 동점 시: 가장 빠른 랩타임, 그 다음 일관성
9. 실격
- 기술 규격 위반
- 안전 규칙 위반
- 스포츠맨십에 어긋나는 행위
- 다른 팀 차량에 대한 방해
- 금지된 장비 또는 소프트웨어 사용
- 주최 측 지시 불이행
- 실격 결정은 최종이며 이의 제기할 수 없습니다
10. 행동 강령
- 모든 참가자는 전문적이고 존중하는 행동을 유지해야 합니다
- 팀은 다른 팀과 주최 측을 존중해야 합니다
- 부정행위나 불공정한 이점을 취하는 모든 행위는 금지됩니다
- 팀은 대회 관계자의 모든 지시를 따라야 합니다
- 행동 강령 위반 시 실격될 수 있습니다
11. 이의 제기 및 분쟁
- 모든 대회 결정은 조직위원회가 내립니다
- 이의 제기는 결정 후 30분 이내에 서면으로 제출해야 합니다
- 이의 제기는 기술위원회에서 검토됩니다
- 최종 결정은 구속력이 있습니다
12. 추가 정보
- 상세한 대회 매뉴얼은 등록 후 제공됩니다
- 트랙 규격은 대회 전에 제공됩니다
- 규칙 변경 사항은 모든 등록 팀에 통보됩니다
- 주최 측은 필요 시 규칙을 수정할 권리가 있습니다
- 문의사항은 조직위원회에 연락하시기 바랍니다
Frequently Asked Questions
General Questions
Q: How do I register for the competition?
A: Registration can be completed through the Registration page. The deadline is December 31, 2025.
Q: How many team members are allowed?
A: Each team must have between 2 and 6 members.
Q: Do I need to bring my own car?
A: Yes, each team must bring their own RoboRacer car built according to the specifications.
Technical Questions
Q: What computing platform should I use?
A: NVIDIA Jetson or equivalent platforms are recommended. Detailed specifications are provided in the build manual.
Q: Where can I find the build manual?
A: The build manual and all technical documentation will be provided after registration confirmation via email.
Q: Can I use open-source software?
A: Yes, teams are encouraged to use the provided open-source RoboRacer ROS2 stack and can modify it as needed.
Competition Questions
Q: What is the competition format?
A: The competition consists of qualification sessions (time trials) followed by knockout racing phases and the Grand Prix final.
Q: How is scoring determined?
A: Scoring is based on completion time and track boundary violations. The primary objectives are: don't crash and minimize laptime.
Q: When will I receive track information?
A: Track layout and specifications will be provided to registered teams prior to the competition.
Support
Q: Who can I contact for questions?
A: Please contact the organizing committee at the contact information provided on the website.